Master and Specialization projects
(Make an
appointment to get more information about the projects. Contact: Jo Arve Alfredsen)
Robotic
fish tracking - integration of unmanned surface vehicle and acoustic fish
telemetry
Gaining a
fundamental understanding of the behaviour and spatiotemporal distribution of
fish and other marine living resources stands high on the international
research agenda because it relates directly to our ability to devise
sustainable management strategies for the oceans and the global marine
environment. Scientific progress in this area is treasured and of broad
societal value. This project targets developing enabling technologies that will
create novel opportunities within fish and fisheries research.
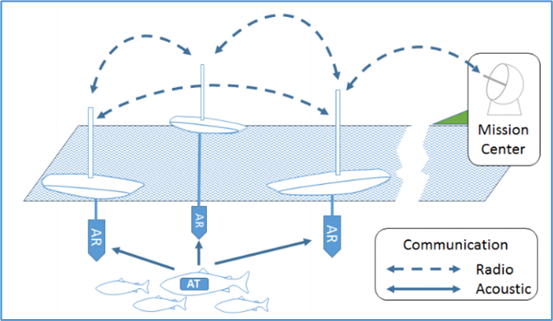
Figure:
Robotic fish tracking system.
Autonomous
vehicle systems and acoustic fish telemetry are research areas of strong
tradition and merits at the Department of Engineering Cybernetics. The project
aims to enable close integration of these areas to create novel platforms for
robotic search, localisation and tracking of marine life, migrating fish, and
other similarly small and evasive underwater objects. The research will move
current operational limits of fish/underwater object tracking and contribute
significantly to making new innovative technology available to researchers and
enable new discoveries within movement ecology and the marine sciences in
general.
The USV Otter and AutoNaut vehicle platforms are
available at the department and under development with our own controls,
sensors and instruments, where acoustic fish telemetry receivers will be an
essential part of the vehicles’ payload. Several interesting student
assignments on different topics may be defined within the frame of this
project:
·
Design
of embedded hardware and software for:
o
vehicle
controls and communications
o
sensors
and payload integration
·
Optimal
search, mission and path planning
·
Underwater
target localisation and stealthy tracking
·
Multi-agent-
and formation control, machine learning

Figure: The
fish tracking Otter USV.
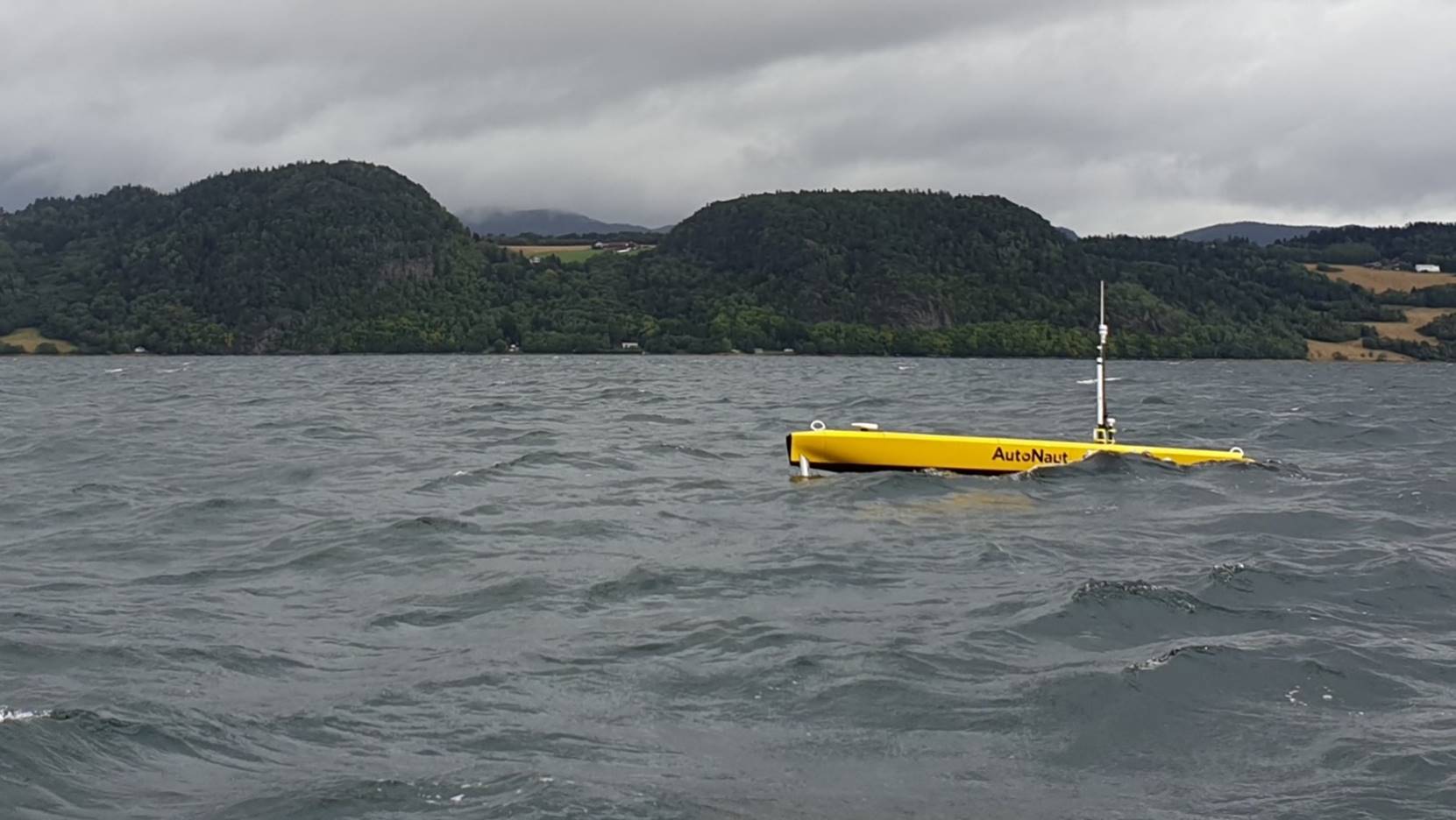
Figure:
Department's wave-driven USV, AutoNaut.
Integration
of a machine vision plankton sensor in an unmanned surface vehicle for
real-time autonomous ocean monitoring
The
abundance, composition and dynamics of the phytoplankton community greatly
impact ocean productivity and health. Plankton blooms may under certain
circumstances develop excessively into a critical state that causes oxygen
depletion and/or toxic conditions for organisms living in the ocean environment
(HAB – harmful algal bloom). HABs can be particularly detrimental to fish
farming and other aquacultural production.
This
project aims to design a cost-efficient and flexible platform that will enable
persistent autonomous plankton sampling and analyses. The focus will be on
adapting the sensor payload, a machine vision-based plankton sensor (PlanktoScope), to an unmanned
surface vehicle platform (USV
Otter) and exploring the solution through practical experiments on
Trondheimsfjorden.
LPWAN
gateway buoy (LoRa, NB-IoT) for underwater acoustic sensor
This
project concerns the development of a buoy solution for relaying data received
by an underwater acoustic receiver to an internet backend. The buoy will
typically be deployed in remote fjord and coastal locations for several months.
It should be capable of transmitting data wirelessly to a gateway on shore
while consuming minimal power. The wireless link will be based on LoRaWAN
and/or NB-IoT to meet the low-power long-range requirements of the system. The
project will focus on software design and development on the dedicated embedded
buoy controller, LPWAN networks, internet technology, and realisation of the
bridge from the LPWAN application layer to the DUNE software framework for
heterogenous autonomous vehicles.
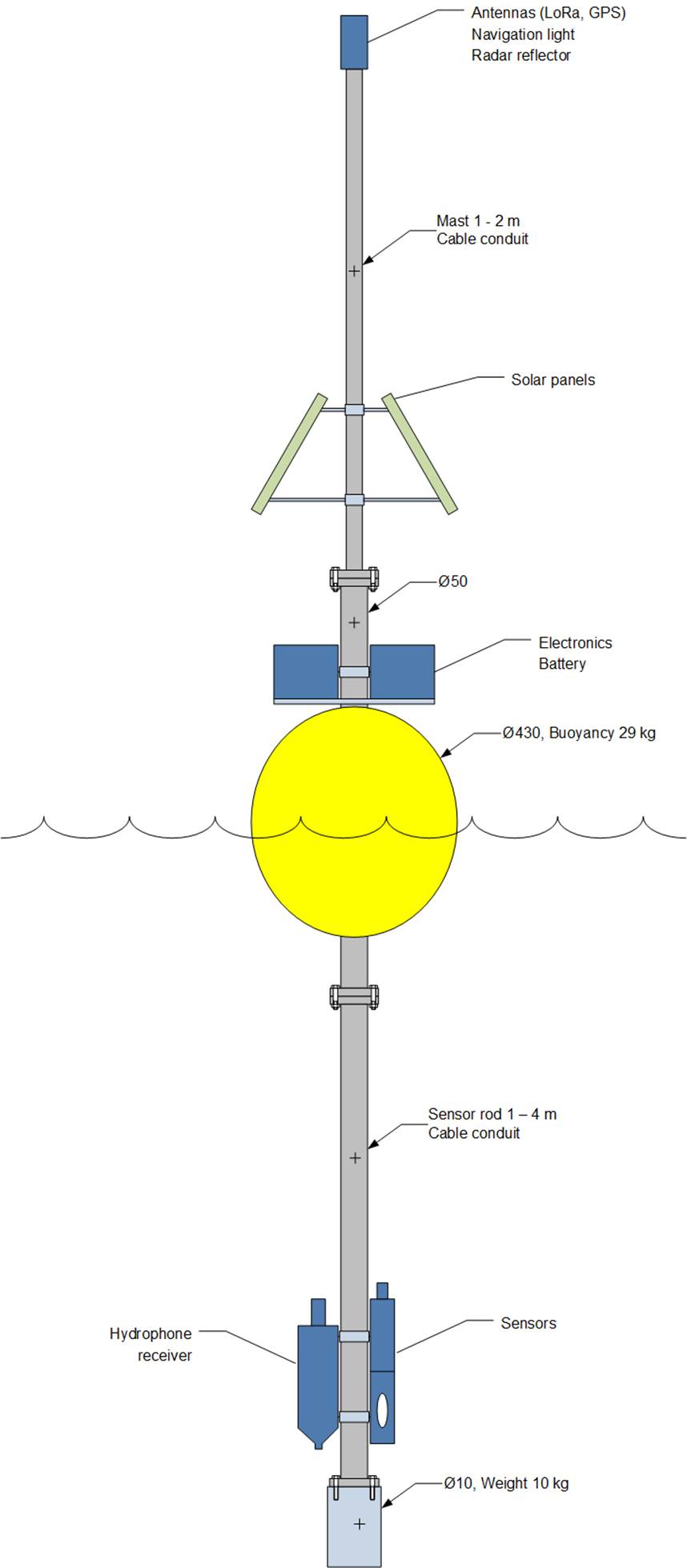
Figure:
Remote hydrophone buoy concept.

Figure:
Deployment of buoy prototype in a remote fjord.
Smart
autonomous Lagrangian drifters for flow measurement in large-scale sea cages
A prototype
buoyancy vehicle (BV) for underwater actuation has been developed. The BV can
generate its own vertical motion by controlling the buoyancy force through a
piston-based displacement manipulation mechanism and, hence, its own volumetric
mass density. Furthermore, stabilisation of the BV at a specific reference
depth is made possible through a pressure sensor and feedback control of
buoyancy. The ability to stay neutral at a reference depth enables using the BV
as a subsurface Lagrangian drifter for ocean current measurements, which is a
target application for the BV. The underwater positioning system described in the
project below will enable efficient subsurface tracking of the drifter.
The project
aims to bring the prototype BV into a fully operational state that enables
testing of its performance as a subsurface Lagrangian drifter. Design and realisation
of an embedded computer (HW and SW) for controlling the vehicle will be central
to this task, as will experimental validation in a full-scale sea cage. The BV
should also provide a practical user interface for configuring the unit and
retrieving onboard logging data.
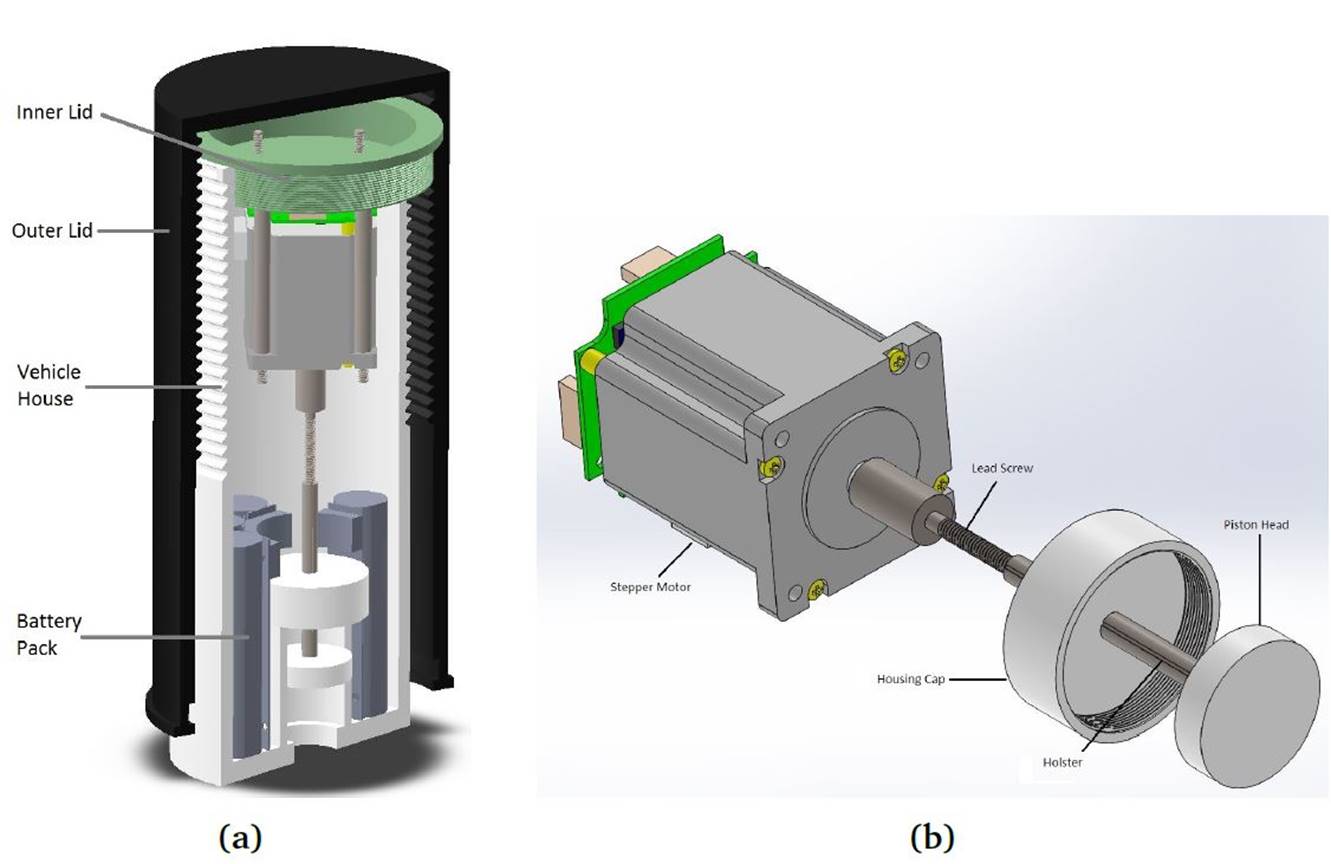

Figure:
Vehicle that can control its own buoyancy using a piston mechanism.
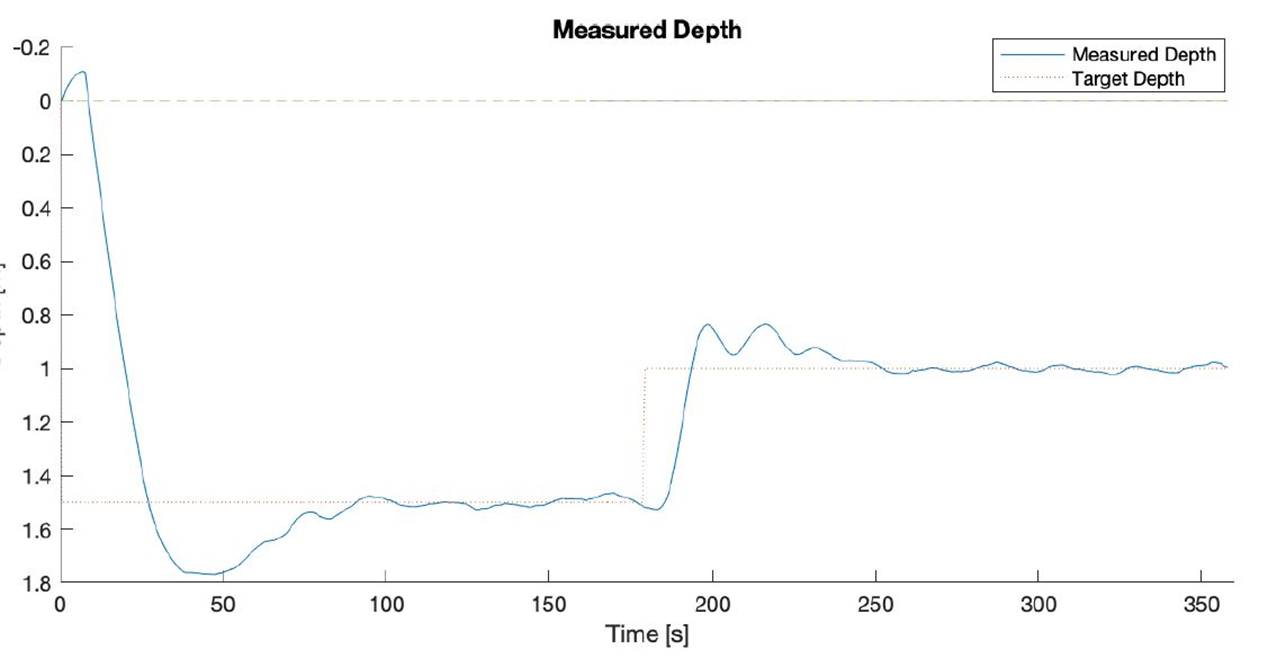
Figure:
Typical step response of the buoyancy vehicle.
Underwater
ultra-low power acoustic positioning system
Acoustic
fish telemetry constitutes a powerful scientific tool for investigating the
behaviour of fish and other aquatic animals remotely in the underwater
environment. The concept is enabled by developments in microelectronics, MEMS
sensors, and ultra-low power embedded microcontrollers and is sometimes referred
to as “fish & chips”. This project is concerned with developing a system
for estimating the position and tracking the movement of fish and other small
subsea objects (e.g., an AUV) carrying miniature acoustic transmitters. The
approach will be based on time difference of arrival (TDoA) measurements of
signals in a spatially dispersed array of acoustic receivers (hydrophones)
spanning the area of interest, e.g. an industry-scale fish cage. Receiver synchronisation
is achieved through GNSS-based disciplining of receiver clocks through a
dedicated battery-driven hardware module. The module also determines the receiver's
position and provides an ultra-low power radio interface for communicating TDoA
measurements in real-time to a central frontend computer for data processing
and presentation. The main tasks of the project will be to develop embedded
software for the hardware module that exploits its extremely low-power
capability (including GNSS and wireless communication interface) and a flexible
frontend solution that allows real-time estimation and visualisation of
transmitter position, as well as relaying position data to other relevant
systems (e.g. an underwater vehicle).
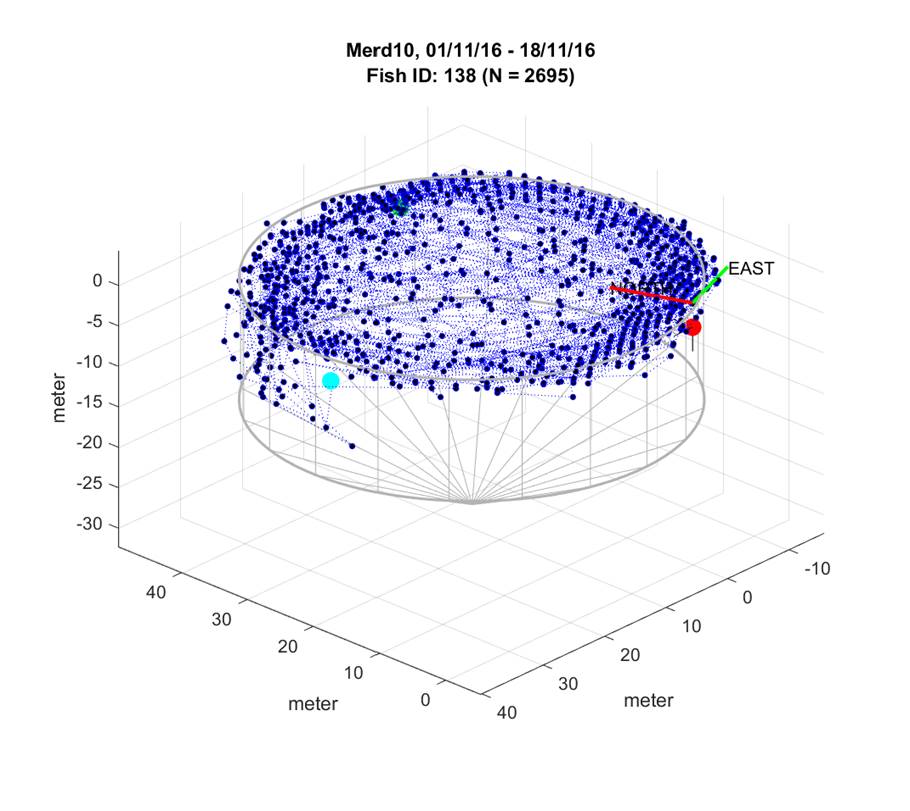
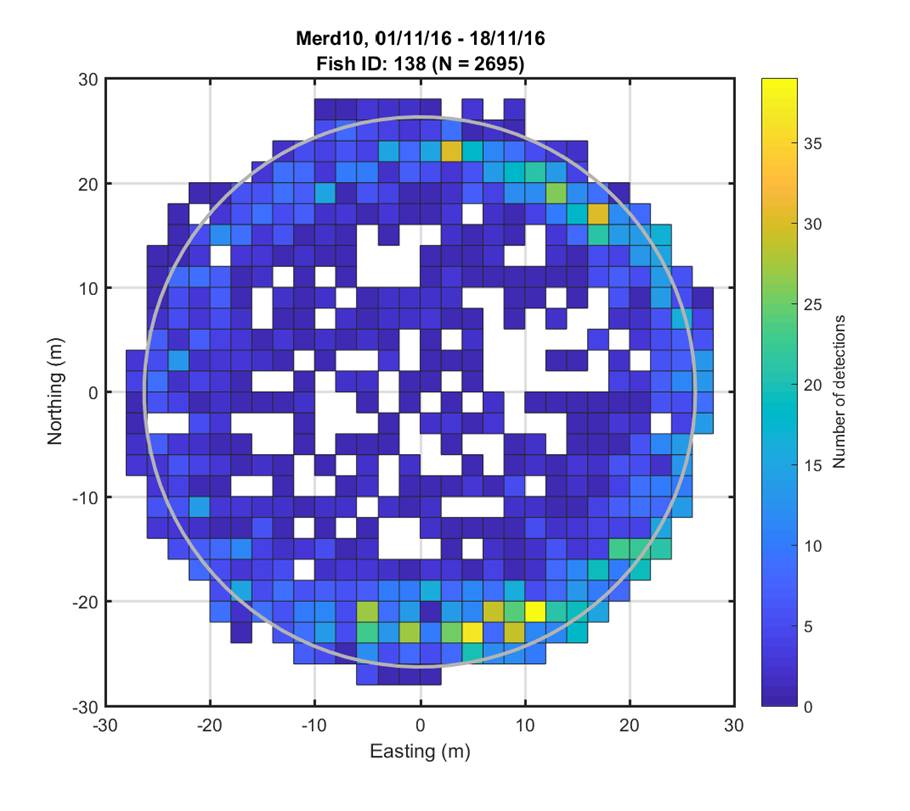
Figure:
Localization of a fish in a fish cage (3D and horizontal heatmap).
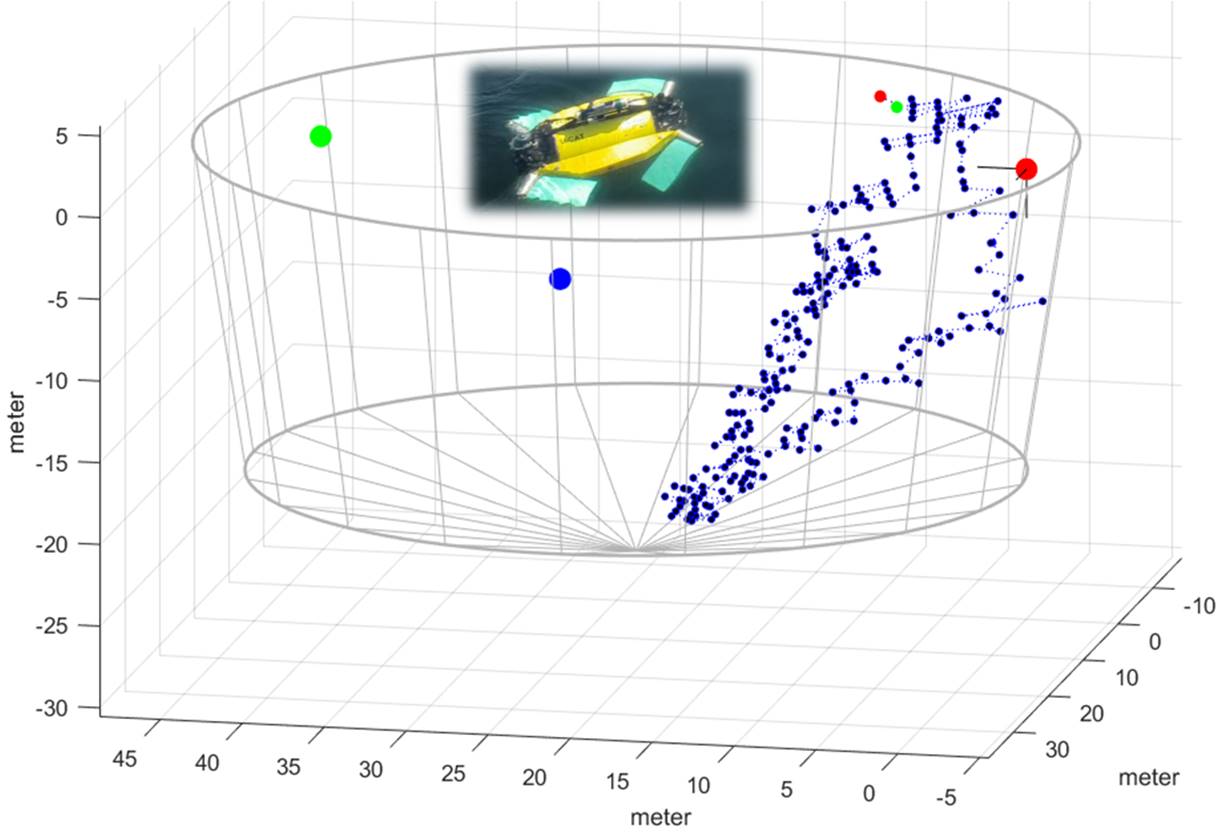
Figure:
Underwater localisation of "turtle-robot" UCAT on a mission in a fish
cage.
IoF
- Internet of Fish, an online fish monitoring system for sea farms
This
project is related to the project described above but is focused on developing
innovative backend and frontend solutions inspired by the IoT paradigm. The
embedded module controlling the acoustic receiver features LoRa wireless radio
communication, a key IoT technology enabling highly efficient data relaying
from underwater sensors. The project is mainly a software design project, identifying
use cases and user requirements, high-level software design, and implementing a
suitable IoT backend and frontend application layer solution based on Internet
technologies (e.g. MQTT, cloud computing, web services).
Ultra-low
power electronic sensor tags for fish behavioural tracking
Electronic
fish tags have benefitted vastly from the technological progress of
microelectronics in terms of miniaturisation, energy efficiency, MEMS and
signal processing capacity. With the increasing availability of data from
large-scale earth observation systems (satellites), modern electronic fish tags
are pushing the frontiers of knowledge in fish movement ecology. The proposed
project involves designing and coding a miniature embedded computer that
integrates a combined ATT (Acoustic Transmitter Tag) and DST (Data Storage Tag)
functions. This combination will allow the electronic tag to work as a
traditional DST (sensor data logger) when migrating in the open sea beyond
receiver coverage, while the ATT function gets switched on only when the fish
dwell in coastal waters, fjords and rivers where receiver coverage is more
likely. The transmitter will also function as an acoustic beacon that significantly
increases the likelihood of tag recovery, the primary weakness and impediment
of traditional DST-based studies.
The tag
platform should be designed to accommodate a variety of sensors, e.g. course of
swimming (magnetometer), swimming activity (accelerometer), inclination of
geomagnetic field (magnetometer), water temperature (thermometer), swimming
depth (pressure sensor), and physiology (ECG, pulse oximetry and
plethysmography), and being able to store logging data for extensive periods in
non-volatile memory. The project will be based on a prototype tag platform and
may be adapted to current needs in associated research projects.

Figure: Electronic
fish tags - miniaturised embedded computers.
IoT
and environmental sensing in water resource monitoring
Ultra-low
power microcontrollers, sensors, and LPWAN wireless technologies create
unprecedented opportunities for the scale, resolution, and persistence of
real-time environmental monitoring. This project targets developing efficient
and low-cost wireless sensor nodes (embedded computers) for distributed,
real-time monitoring of river system discharge and flooding events.
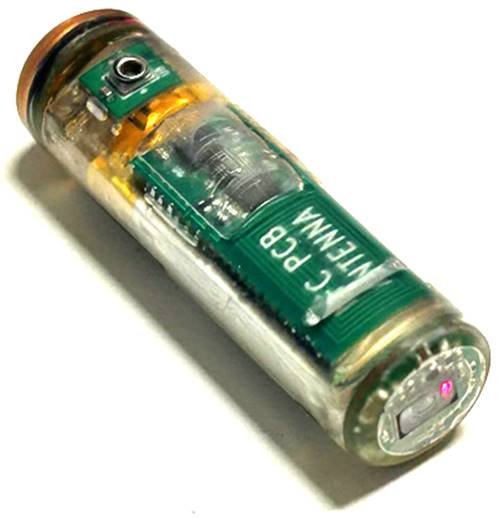
Remotely
activated intelligent LED tag for fish
Highly
valuable broodfish are kept together in large seawater tanks in fish hatcheries
but must be identified and handled individually during stripping and fertilisation.
This project concerns the design and develop a miniature addressable LED tag
that can be attached to the back of broodfish and activated remotely
(wirelessly from outside the tank), thereby identifying a specified individual
visually with minimal distraction and disturbance to the tank environment (the
selected fish emits a distinct blink pattern). The LED tag must be tiny and
have an operational life of several months, which requires an ultra-low power
design approach for the tag’s electronics and signal processing solution.
Instrumentation
and monitoring solutions for kelp farms
Large-scale
seaweed cultivation and production is a relatively new and growing European
industry with massive potential in Norwegian coastal waters. Seaweed production
is an example of regenerative aquaculture and is an essential ingredient in many
products and processes (nutrition, medicine, energy). It also has great
potential for future carbon capture and climate mitigation. Collaborate with
SINTEF Ocean and industry to develop instrumentation and monitoring solutions
that will be needed to support the design of future kelp farms. Developing
sensor buoys for measuring the shape and structural integrity of farms and
cultivation lines using, e.g., high-precision RTK-GPS is one of several
possible student projects in this area. More information on this project will
be provided upon request.
Optimisation
and user interface design for Atlantic salmon biosensing implant
 Maintaining
fish welfare and health are crucial elements in sustainable aquaculture
production. However, the welfare and health of farmed fish in Norway is of concern,
with 62.7 million salmon dying in aquaculture sea cages in 2023, which has
remained relatively stable in recent years. While there have been advancements
in managing challenges like lice and diseases, the aquaculture industry lacks
solutions to consistently and objectively document fish welfare. To this end,
biosensing implants can be used to monitor the physiological and behavioural
responses of individual fish. Such responses are associated with stress, which,
in turn, can indicate conditions detrimental to the animal's welfare.
Maintaining
fish welfare and health are crucial elements in sustainable aquaculture
production. However, the welfare and health of farmed fish in Norway is of concern,
with 62.7 million salmon dying in aquaculture sea cages in 2023, which has
remained relatively stable in recent years. While there have been advancements
in managing challenges like lice and diseases, the aquaculture industry lacks
solutions to consistently and objectively document fish welfare. To this end,
biosensing implants can be used to monitor the physiological and behavioural
responses of individual fish. Such responses are associated with stress, which,
in turn, can indicate conditions detrimental to the animal's welfare.
A novel biosensing implant has been
proven to expand the selection of parameters that implants with pulse oximetry
can measure. However, the technology readiness level must be increased to optimise
battery life, improve memory utilisation, and simplify mission planning and
data download. The project may include various tasks such as:
1. Embedded system programming for energy optimisation.
2. Develop and test algorithms for auto adjustment of sensors.
3. Develop and test algorithms for data processing.
4. Embedded system programming for data compression.
5. Design and implementation of GUI for mission planning and data download.
6. Design and testing of an acoustic data transmission system.
Contact at SINTEF: Eirik Svendsen, Department of Aquaculture Technology,
SINTEF Ocean