Master and
Specialization projects
(Make an
appointment and get more information about the projects. Contact: Jo Arve Alfredsen)
Integration of a machine vision
plankton sensor in an unmanned surface vehicle for real-time autonomous ocean
monitoring
The
abundance, composition and dynamics of the phytoplankton community have great
impact on ocean productivity and health. Plankton blooms may under certain circumstances
develop excessively into a critical state that causes oxygen depletion and/or
toxic conditions for organisms living in the ocean environment (HAB – harmful
algal bloom). HABs can be particularly detrimental to fish farming and other
aquacultural production.
The goal of
this project is to design a cost-efficient and flexible platform that will
enable persistent autonomous plankton sampling and analyses. Focus will be on
adapting the sensor payload, a machine vision-based plankton sensor (PlanktoScope),
to an unmanned surface vehicle platform (USV Otter) and explore the
solution through practical experiments on Trondheimsfjorden.
Implementation of machine
learning algorithms on an embedded platform (in cooperation with Nortek AS)
Machine
learning (ML) is a branch of artificial intelligence (AI) which deals with the
use of data and computer algorithms, where algorithms identify and learn
patterns from the available data with the overall goal of self-improvement. ML
algorithms deal with large amount of data and involve computationally complex
mathematical operations, putting a very high demand on memory and compute
power. Recently, a trend called Edge ML has been started where ML algorithms
are implemented on embedded platforms, having limited memory and compute power.
The rationale behind Edge ML is that an algorithm could be trained on a
computationally stronger system, whereas the process of inference i.e., making a decision for a new input based on the ML model is
executed on the embedded platform. Tools exist which offer quantization of the
ML algorithms, which basically scales down ML models e.g., by a factor of 4 to
16 in size, making them implementable on an embedded computer.
Nortek AS
designs, develops and produces scientific instruments
that apply the Doppler principle to underwater acoustics in order to measure
water in motion, such as currents and waves. Currently, Nortek is evaluating a
new processing platform and use of machine learning algorithms in future
instruments. This project deals with the implementation and evaluation of the
TensorFlow APIs on a Digi ConnectCore® 8M Nano
Development Kit (CC8MNDVK). CC8MNDVK is based on NXP i.Mx8M
Nano SoC which is a multi-core embedded system offering a quad core ARM Cortex
A-53 processor with a dedicated GPU. The master project involves tasks such as,
implementation of a simple ML application (e.g. image classification) based on
TensorFlow python API on a desktop computer/cloud server, auantization
and implementation of the model on the CC8MNDVK platform using TensorFlow Lite
python API, training and implementation of a ML algorithm e.g. for bottom
tracking using a time series from Norteks DVL instrument
on a desktop computer or a cloud server in python, and quantizing the bottom
tracking model and run the inference on the CC8MNDVK platform using python and
C++ API with and without CPU/GPU delegates.
Robotic fish tracking -
integration of unmanned surface vehicle and acoustic fish telemetry
Fundamental
understanding of the behaviour and distribution of marine living resources
stands high on the international research agenda as it relates closely to our
ability to work out sustainable management regimes of the oceans and the global
marine environment. Scientific progress in this area is treasured and of broad
societal value. This project targets development of new enabling technology
that will make significant contributions in this direction.
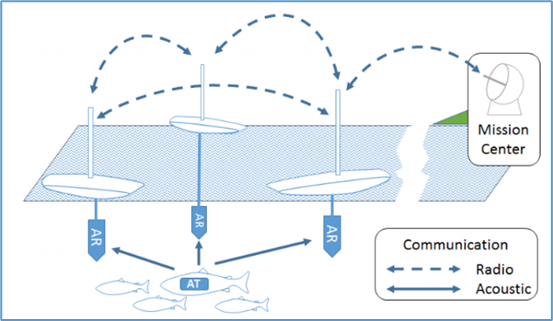
Figure:
Robotic fish tracking system.
Autonomous
vehicle systems and acoustic fish telemetry are both research areas of strong
tradition and merits at the Department of Engineering Cybernetics. The project
aims to enable close integration of these areas to create novel platforms for
robotic search, localization and tracking of marine life, migrating fish, and
other similarly small and evasive underwater assets. The research will move
current operational limits of fish/underwater object tracking and contribute
significantly in terms of making new innovative technology available to
researchers and enable new discoveries within movement ecology and the marine
sciences in general.
The USV Otter and AutoNaut
vehicle platforms are available at the department and under development with
our own controls, sensors and instruments, where acoustic fish telemetry
receivers will be an essential part of the vehicles’ payload. Several
interesting student assignments on different topics may be defined within the
frame of this project:
·
Design
of embedded hardware and software for:
o
vehicle
controls and communications
o
sensors
and payload integration
·
Optimal
search, mission and path planning
·
Underwater
target localization and stealthy tracking
·
Multi-agent-
and formation control, machine learning

Figure: The
fish tracking Otter USV.

Figure:
Department's wave-driven USV, AutoNaut.
Instrumentation and
control of fish crowding system
In
industrial-scale fish farming, fish crowding constitutes a particularly
critical operation which may have strong negative impact on fish welfare, mortality and quality of product. Fish crowding is at the
same time an important and unavoidable task inherent to many farm operations
such as sorting, delousing and fish harvesting. Proper tools for monitoring and
controlling the crowding process to stay within safe limits are therefore in
great demand. The purpose of this project is to investigate different
strategies for equipping the crowding gear and fish cage with sensors and
instrumentation that can provide relevant information in real-time about the
state of the crowding process and the fish’ response. The project will also
investigate how this information can be exploited to control the crowding
process in a way that minimizes the risk of injuring the fish in terms of
mechanical damage and hypoxia. Sensor integration, embedded systems development
and data analysis will be central and there will be good opportunities for
experimental testing of prospective solutions. The project will be carried out
in collaboration with SINTEF Ocean.
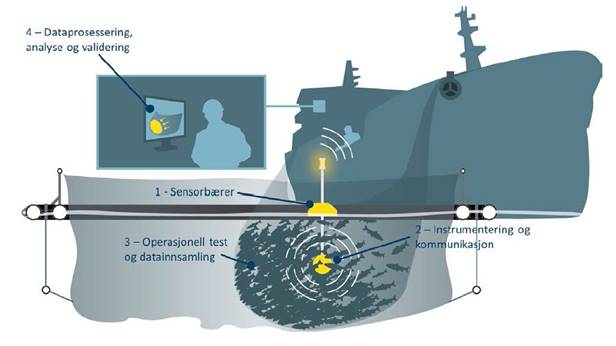
Figure: Fish
crowding monitoring and control system.
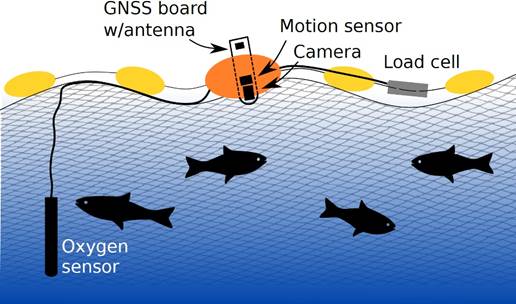
Figure:
Conceptual illustration of a smart sweep-net sensor
LPWAN gateway buoy (LoRa, NB-IoT)
for underwater acoustic receiver
This
project concerns development of a buoy solution for relaying data received by
an underwater acoustic receiver to an internet backend. The buoy will typically
be deployed for several months in remote fjord and coastal locations and should
be capable of transmitting data wirelessly to a gateway on shore while
consuming minimal amounts of power. The wireless link will be based on LoRaWAN and/or NB-IoT to meet the low-power long-range
requirements of the system. The project will focus on software design and
development on the dedicated embedded buoy controller, LPWAN networks, internet
technology, and realization of bridge from LPWAN application layer to the DUNE
software framework for heterogenous autonomous vehicles.
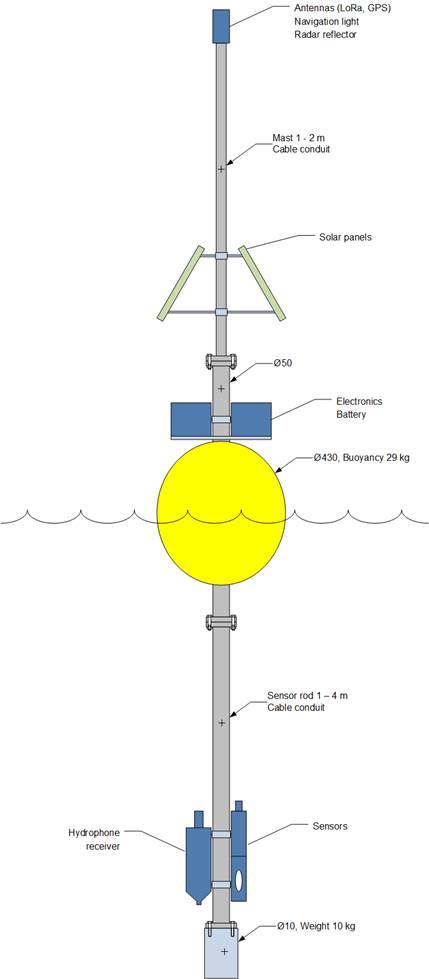
Figure:
Remote hydrophone buoy concept.

Figure:
Deployment of buoy prototype in a remote fjord.
Smart autonomous Lagrangian drifters for flow measurement in large-scale sea
cages
A prototype
buoyancy vehicle (BV) for underwater actuation has been developed. The BV is capable of generating its own vertical motion by
controlling the buoyancy force through a piston-based displacement manipulation
mechanism and, hence, its own volumetric mass density. Furthermore,
stabilization of the BV at a certain reference depth is made possible through a
pressure sensor and feedback control of buoyancy. The ability to stay neutral
at a reference depth enables use of the BV as a subsurface Lagrangian
drifter for ocean current measurements, a target application for the BV. The
underwater positioning system described in project below will enable efficient
subsurface tracking of the drifter.
The goal of
the project is to bring the prototype BV into a fully operational state that
enables testing of its performance as a subsurface Lagrangian
drifter. Design and realization of an embedded computer (hw
and sw) for controlling the vehicle will be central
in this task, as well as experimental validation in a full-scale sea cage. The
BV should also provide a practical user interface for configuration of the unit
as well as retrieval of onboard logging data.
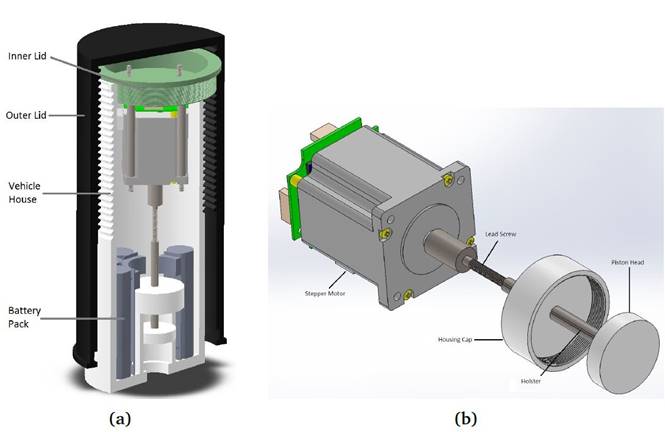

Figure:
Vehicle that can control its own buoyancy using a piston mechanism.

Figure:
Typical step response of the buoyancy vehicle.
Underwater ultra-low power
acoustic positioning system
Acoustic
fish telemetry constitutes a powerful scientific tool for investigating the
behaviour of fish and other aquatic animals remotely in the underwater
environment. The concept is enabled by developments in microelectronics, MEMS
sensors, and ultra-low power embedded microcontrollers, and is sometimes be
referred to as “fish & chips”. This project concerns the development of a system
for estimating the position and tracking the movement of fish as well as other
small subsea objects (e.g. an AUV) carrying miniature acoustic transmitters.
The approach will be based on time difference of arrival (TDoA)
measurements of signals in a spatially dispersed array of acoustic receivers
(hydrophones) spanning the area of interest, e.g. an industry-scale fish cage.
Receiver synchronization is achieved through GNSS-based disciplining of
receiver clocks through a dedicated battery driven hardware module. The module
also determines the position of the receiver and provides an ultra-low power
radio interface for communicating TDoA measurements
in real-time to a central frontend computer for data processing and
presentation. The main tasks of the project will be to develop embedded
software for the hardware module that exploits its extreme low-power capability
(including GNSS and wireless communication interface) and a flexible frontend
solution that allows real-time estimation and visualization of transmitter
position, as well as relaying position data to other relevant systems (e.g. an
underwater vehicle).
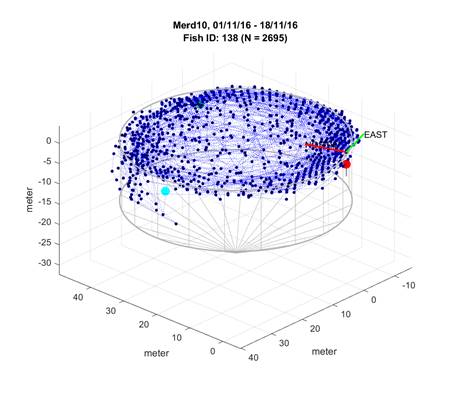
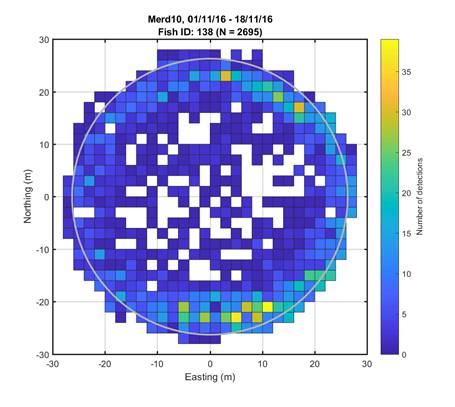
Figure:
Localization of a fish in a fish cage (3D and horizontal heatmap).
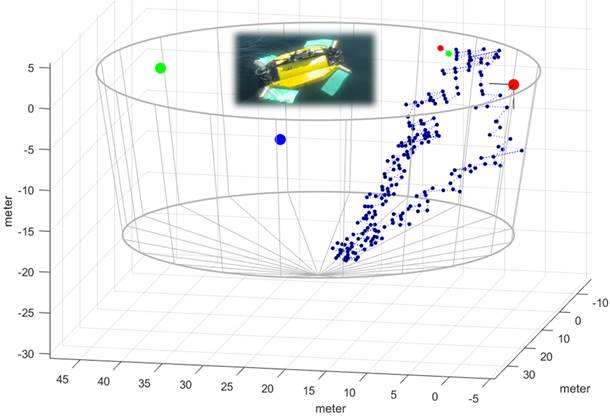
Figure:
Underwater localization of "turtle-robot" UCAT on a mission in fish
cage.
IoF - Internet of Fish, online fish
monitoring system for sea farms
This
project is related to the project described above, but
is focused on the development of innovative backend and frontend solutions
inspired by the IoT paradigm. The embedded module controlling the acoustic
receiver features LoRa wireless radio communication, a key IoT technology, that
enables extremely efficient relaying of data from the underwater sensors. The
project is mainly a software design project, with identification of use cases
and user requirements, high level software design, and implementation of a
suitable IoT backend and frontend application layer solution based on Internet
technologies (e.g. mqtt, cloud computing, web
services).
Ultra-low power electronic
sensor tags for fish behavioural tracking
Electronic
fish tags have benefitted vastly from the technological progress of
microelectronics in terms of miniaturization, energy efficiency, MEMS and signal processing capacity. Together with the
increasing availability of data from large-scale earth observation systems
(satellites), modern electronic fish tags are currently pushing the frontiers
of knowledge in fish movement ecology. The proposed project involves design and
coding of a miniature embedded computer that integrates a combined ATT
(Acoustic Transmitter Tag) and DST (Data Storage Tag) function. This
combination that will allow the electronic tag to work as a traditional DST
(sensor data logger) when migrating in the open sea beyond receiver coverage,
while the ATT function gets switched on only when the fish dwell in coastal
waters, fjords and rivers where receiver coverage is more likely. The
transmitter will also function as an acoustic beacon that will significantly increase
the likelihood of tag recovery, the primary weakness and impediment of
traditional DST-based studies.
The tag
platform should be designed to accommodate a variety of sensors, e.g. course of
swimming (magnetometer), swimming activity (accelerometer), inclination of
geomagnetic field (magnetometer), water temperature (thermometer), swimming
depth (pressure sensor), and physiology (ECG, pulse oximetry and
plethysmography), and being able to store logging data for extensive time
periods in non-volatile memory. The project will be based on a prototype tag
platform and may be adapted to current needs in associated research projects.

Figure: Electronic
fish tags - miniaturized embedded computers.
Lobster Robot - Computer
vision high-throughput behavioural phenotyping system for lobster juveniles
Intensive
aquaculture production of the European lobster has proven notoriously difficult
accomplish. A primary reason for this relates to the agonistic behaviour
(aggression, cannibalism) lobster frequently shown against conspecifics. This
makes lobster rearing using the common approach of communal tank cultures
unfeasible. It has been proposed that careful selection and breeding on
individuals exhibiting more docile behavioural traits, if they can be
identified efficiently, could provide a way around this difficulty. However,
automatic monitoring and assessment of behaviour as well as selection among thousands
of individuals (high-throughput behavioural phenotyping) over extended periods
of time, remains a daunting task, which can only be solved through extensive
use of robotization. This project deals with the development of a prototype of
a high-throughput behavioural phenotyping system for lobster juveniles and
incorporates elements of a variety of technological disciplines such as
robotics, computer vision and real-time control. It will be possible to define
several student assignments within the frames of this project depending on
student interests/skills and project requirements. A mechanical prototype of an
xyz-gantry robot with machine vision cameras and
manipulation tools has already been realized and will be available as a test
bed for the student project(s).

Figure:
Lobster juveniles fighting.
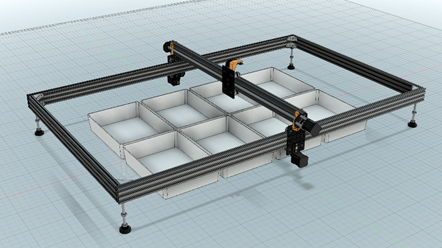
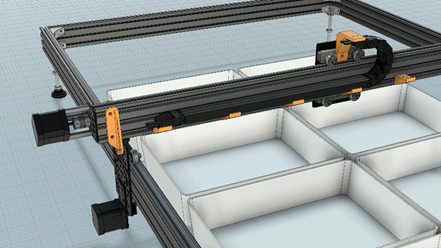
Figure:
Gantry robot for automatic phenotyping and selection of lobster juveniles.